Benchmarking AMD GPUs: bare-metal, containers, partitions¶
Our new benchmark explores two important areas for optimizing AI workloads on AMD GPUs: First, do containers introduce a performance penalty for network-intensive tasks compared to a bare-metal setup? Second, how does partitioning a powerful GPU like the MI300X affect its real-world performance for different types of AI workloads?
This benchmark was supported by Hot Aisle, a provider of AMD GPU bare-metal and VM infrastructure.
Benchmark 1: Bare-metal vs containers¶
Finding 1: No loss in interconnect bandwidth¶
A common concern is that the abstraction layer of containers might slow down communication between GPUs on different nodes. To test this, we measured interconnect performance using two critical methods: high-level RCCL collectives (AllGather, AllReduce) essential for distributed AI, and low-level RDMA write tests for a raw measure of network bandwidth.
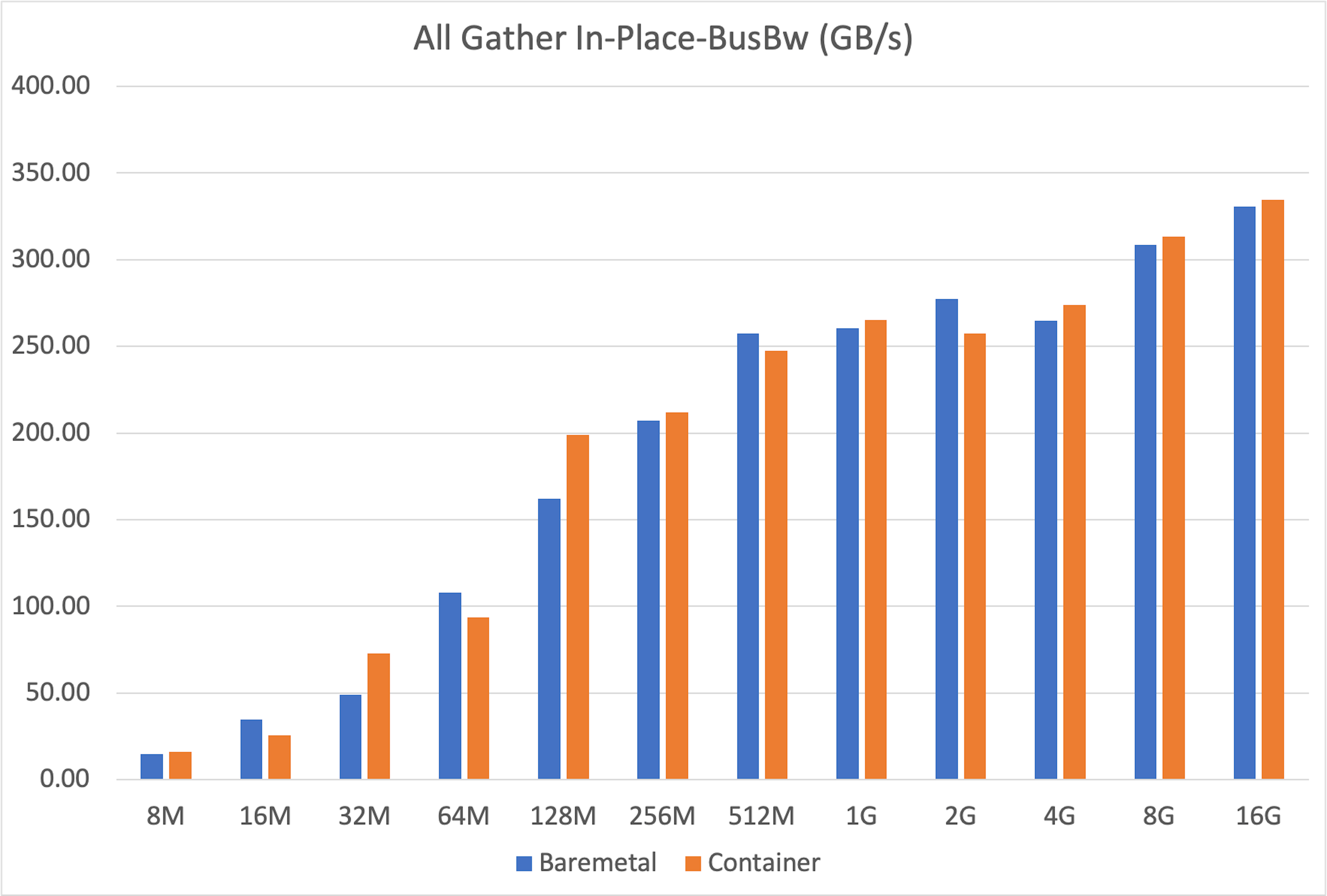
AllGather¶
The all_gather operation is crucial for tasks like tensor-parallel inference, where results from multiple GPUs must be combined. Our tests showed that container performance almost perfectly matched bare-metal across message sizes from 8MB to 16GB.
AllReduce¶
Similarly, all_reduce is the backbone of distributed training, used for synchronizing gradients. Once again, the results were clear: containers performed just as well as bare-metal.
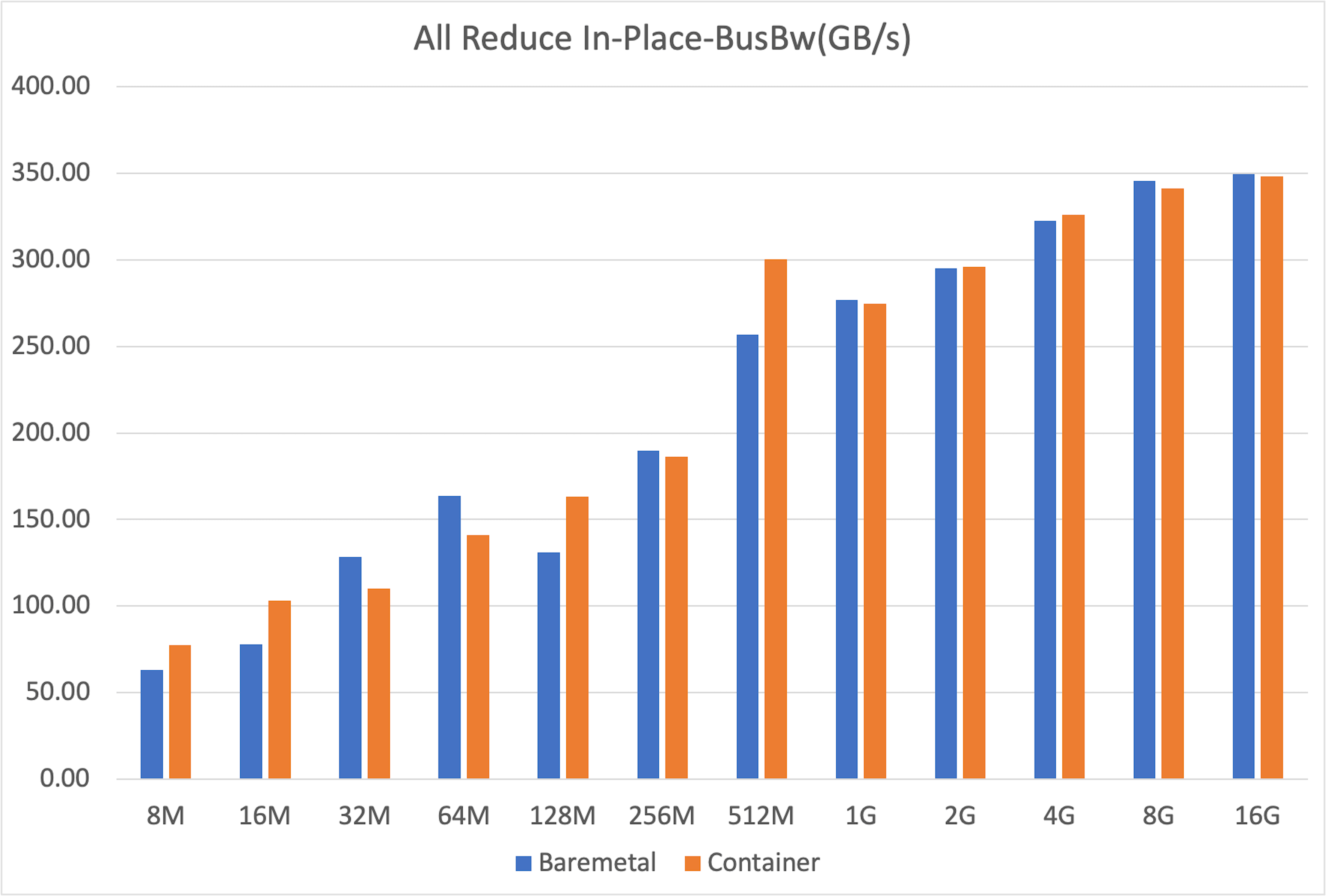
Both bare-metal and container setups achieved nearly identical peak bus bandwidth (around 350 GB/s for 16GB messages), confirming that containerization does not hinder this fundamental collective operation.
Variability
Both setups showed some variability at smaller message sizes—typical behavior due to kernel launch latencies—but converged to stable, identical peak bandwidths for larger transfers. The fluctuations at smaller sizes are likely caused by non-deterministic factors such as CPU-induced pauses during GPU kernel launches, occasionally favoring one setup over the other.
RDMA write¶
To isolate the network from any framework overhead, we ran direct device-to-device RDMA write tests. This measures the raw data transfer speed between GPUs in different nodes.
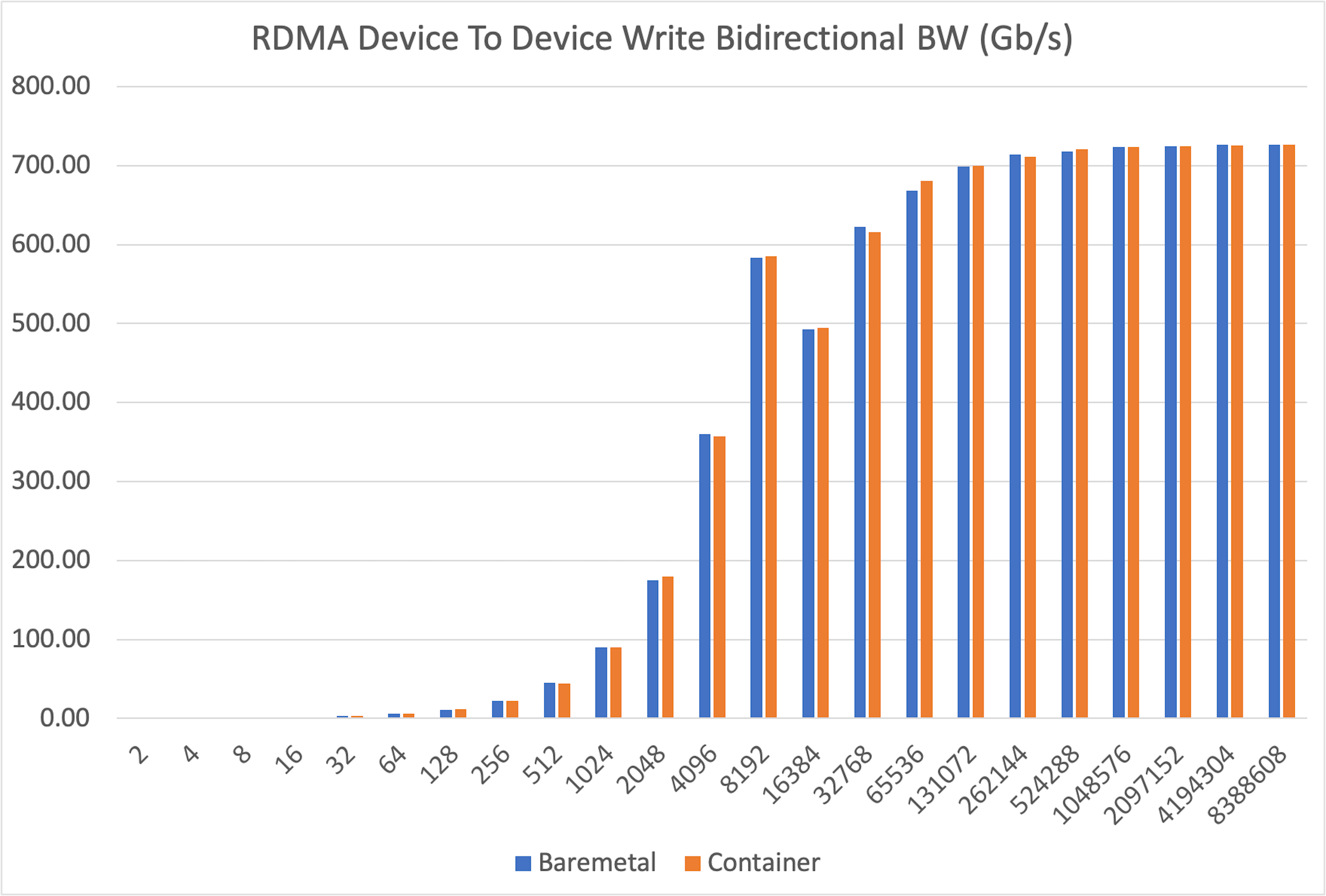
The results were definitive: bidirectional bandwidth was virtually identical in both bare-metal and container environments across all message sizes, from a tiny 2 bytes up to 8MB.
Conclusion¶
Our experiments consistently demonstrate that running multi-node AI workloads inside containers does not degrade interconnect performance. The performance of RCCL collectives and raw RDMA bandwidth on AMD GPUs is on par with a bare-metal configuration. This debunks the myth of a "container tax" and validates containers as a first-class choice for scalable AI infrastructure.
Benchmark 2: Partition performance isolated vs mesh¶
The AMD GPU can be partitioned into smaller, independent units (e.g., NPS4 mode splits one GPU into four partitions). This promises better memory bandwidth utilization. Does this theoretical gain translate to better performance in practice?
Finding 1: Higher performance for isolated partitions¶
First, we sought to reproduce and extend findings from the official ROCm blog. We benchmarked the memory bandwidth of a single partition (in CPX/NPS4 mode) against a full, unpartitioned GPU (in SPX/NPS1 mode).
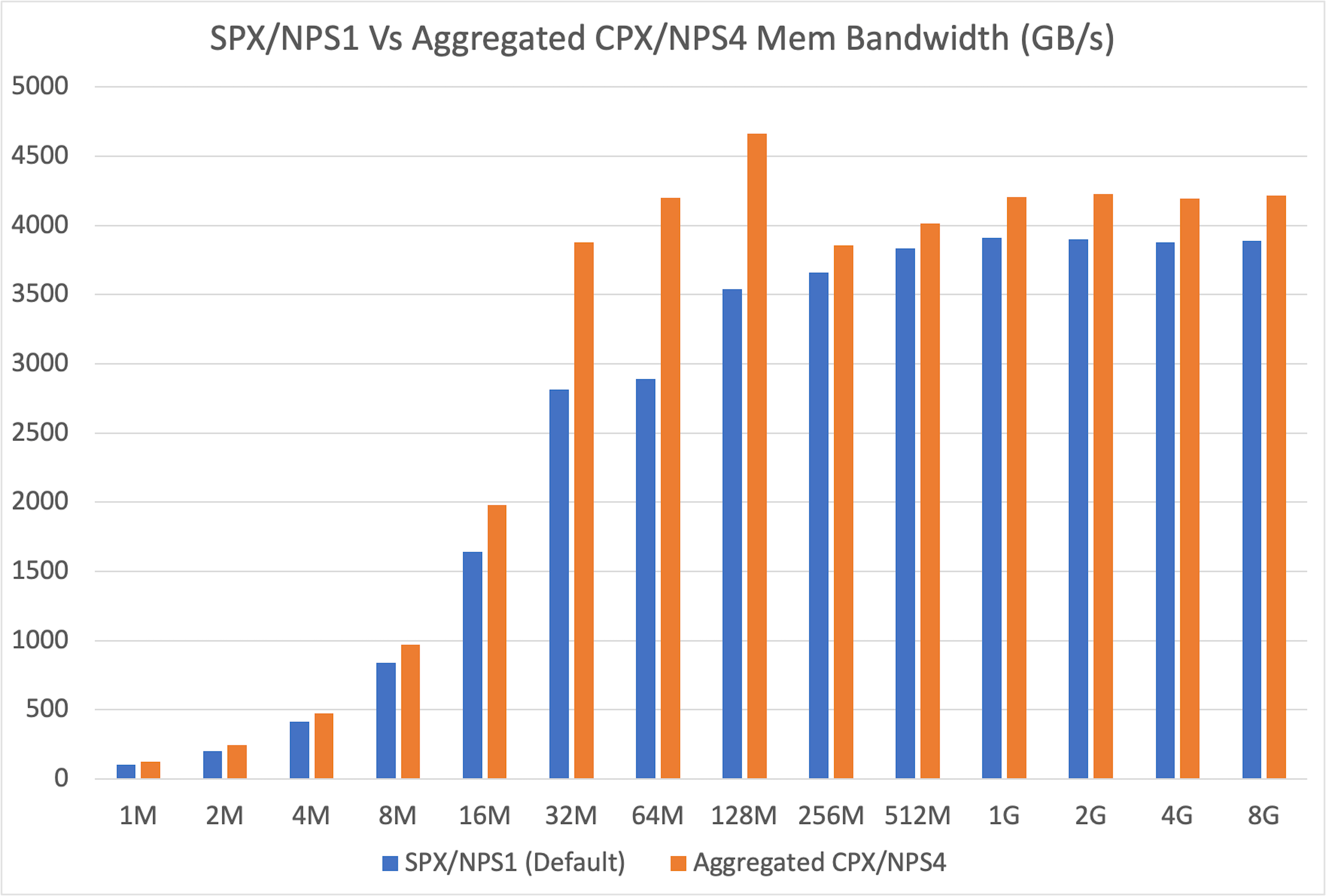
Our results confirmed that a single partition offers superior memory bandwidth. After aggregating the results to ensure an apples-to-apples comparison, we found the partitioned mode delivered consistently higher memory bandwidth across all message sizes, with especially large gains in the 32MB to 128MB range.
Finding 2: Worse performance for partition meshes¶
Our benchmark showed that isolated partitions in CPX/NPS4 mode deliver strong memory bandwidth. But can these partitions work efficiently together in mesh scenarios? If performance drops when partitions communicate or share load, the GPU loses significant value for real-world workloads.
Data-parallel inference¶
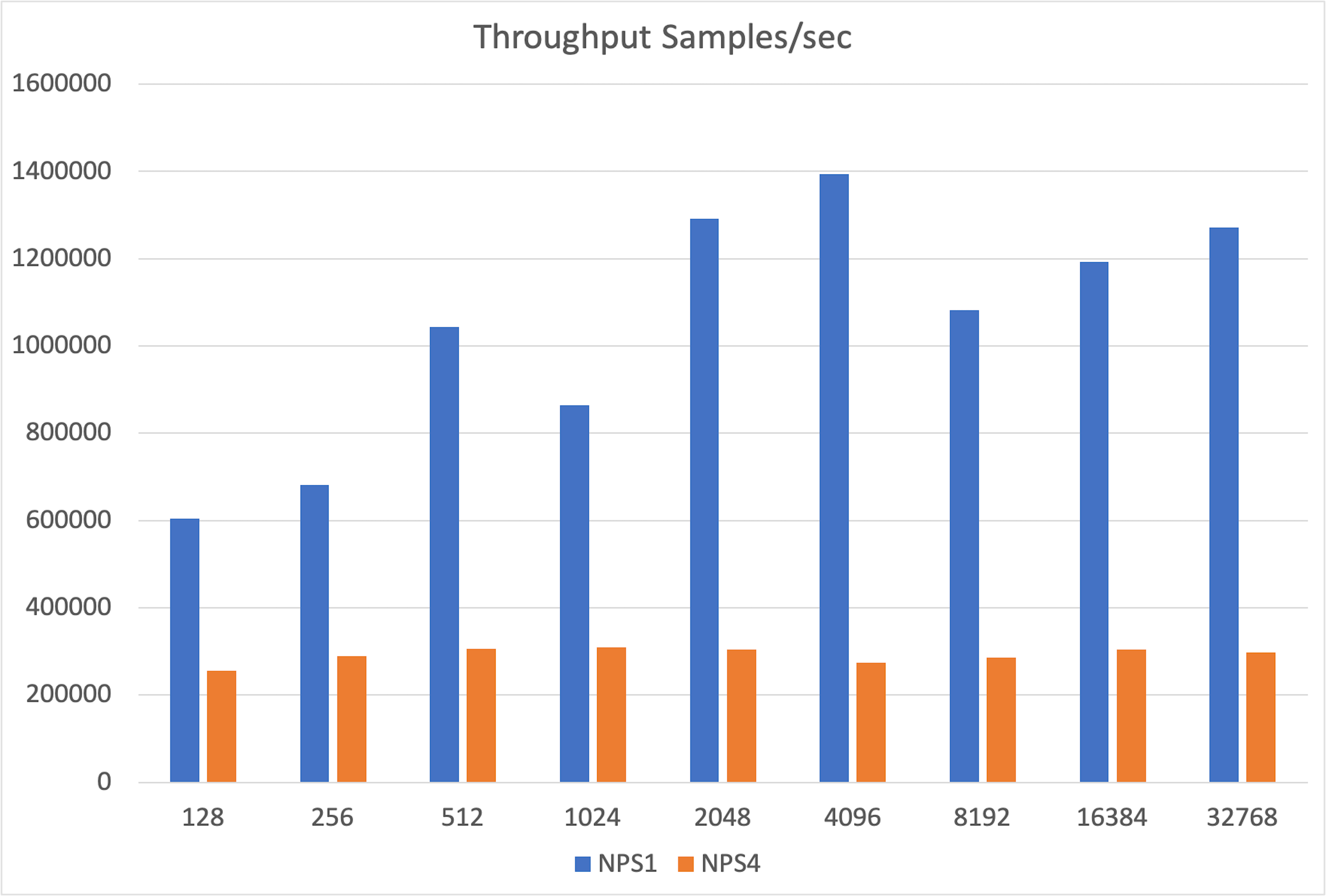
We ran eight independent vLLM instances on eight partitions of a single MI300X and compared their combined throughput against one vLLM instance on a single unpartitioned GPU. The single GPU was significantly faster, and the performance gap widened as the request rate increased. The partitions were starved for memory, limiting their ability to handle the KV cache for a high volume of requests.
The degradation stems from increased memory pressure, as each partition has only a fraction of GPU memory, limiting its ability to handle larger workloads efficiently.
Tensor-parallel inference¶
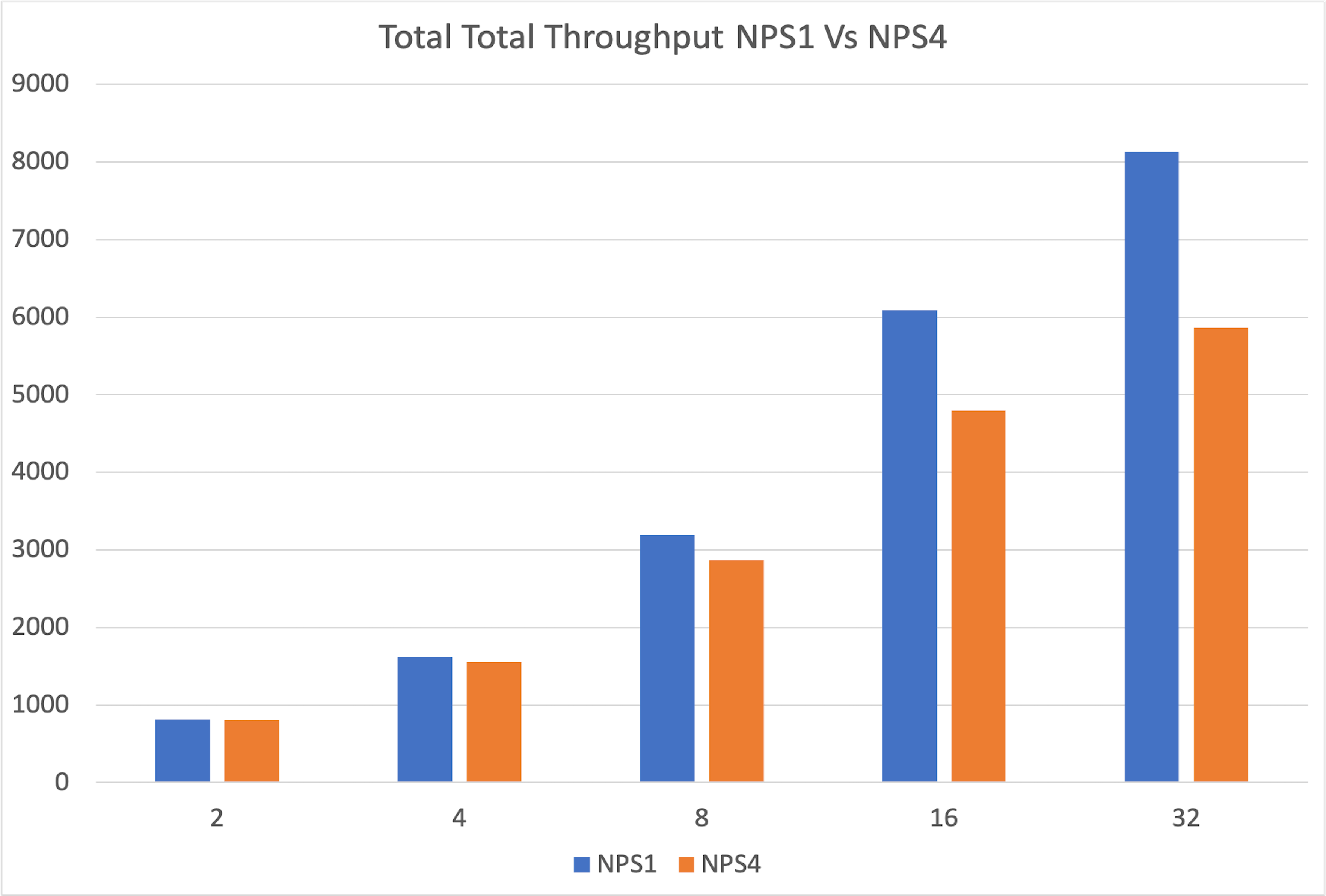
We built a toy inference benchmark with PyTorch’s native distributed support to simulate Tensor Parallelism. A single GPU in SPX/NPS1 mode significantly outperformed the combined throughput of 8xCPX/NPS4 partitions.
The gap stems from the overhead of collective operations like all_gather, which are needed to synchronize partial outputs across GPU partitions.
Conclusion¶
Although GPU partitioning provides a memory bandwidth boost in isolated microbenchmarks, this benefit does not carry over to practical inference scenarios.
In reality, performance is limited by two factors:
- Reduced memory: Each partition has only a fraction of the GPU's total HBM, creating a bottleneck for memory-hungry tasks like storing KV caches.
- Communication overhead: When partitions must work together, the cost of communication between them negates the performance gains.
GPU partitioning is only practical if used dynamically—for instance, to run multiple small development jobs or lightweight models, and then "unfractioning" the GPU back to its full power for larger, more demanding workloads.
Limitations¶
- Reproducibility: AMD’s original blog post on partitioning lacked detailed setup information, so we had to reconstruct the benchmarks independently.
- Network tuning: These benchmarks were run on a default, out-of-the-box network configuration. Our results for RCCL (~339 GB/s) and RDMA (~726 Gbps) are slightly below the peak figures reported by Dell. This suggests that further performance could be unlocked with expert tuning of network topology, MTU size, and NCCL environment variables.
Benchmark setup¶
Hardware configuration¶
Two nodes with below specifications:
- Dell PowerEdge XE9680 (MI300X)
- CPU: 2 x Intel Xeon Platinum 8462Y+
- RAM: 2.0 TiB
- GPU: 8 x AMD MI300X
- OS: Ubuntu 22.04.5 LTS
- ROCm: 6.4.1
- AMD SMI: 25.4.2+aca1101
Benchmark methodology¶
The full, reproducible steps are available in our GitHub repository. Below is a summary of the approach.
Creating a fleet¶
We first defined a dstack SSH fleet to manage the two-node cluster.
type: fleet
name: hotaisle-fleet
placement: any
ssh_config:
user: hotaisle
identity_file: ~/.ssh/id_rsa
hosts:
- hostname: ssh.hotaisle.cloud
port: 22007
- hostname: ssh.hotaisle.cloud
port: 22015
Bare-metal¶
RCCL tests
- Install OpenMPI:
apt install libopenmpi-dev openmpi-bin
- Clone the RCCL tests repository
git clone https://github.com/ROCm/rccl-tests.git
- Build RCCL tests
cd rccl-tests
make MPI=1 MPI_HOME=$OPEN_MPI_HOME
- Create a hostfile with node IPs
cat > hostfile <<EOF
100.64.129.30 slots=8
100.64.129.62 slots=8
EOF
- Run RCCL tests
mpirun --allow-run-as-root \
--hostfile hostfile \
-N 8 \
-n 16 \
--mca plm_rsh_args "-p 22 -l hotaisle" \
--mca btl_tcp_if_include bond0 \
-x NCCL_IB_GID_INDEX=3 \
-x NCCL_IB_DISABLE=0 \
./build/all_gather_perf -b 4 -e 16G -f 2 -g 1 -w 5 --iters 100 -c 0
RDMA write
- Clone the performance tests repository
git clone https://github.com/linux-rdma/perftest
- Build performance tests
cd perftest
./autogen.sh
./configure
make & make install
- Run the server in one node
taskset -c 0-31 ./ib_write_bw -d rocep28s0 -F -a --report_gbits -q 2
- Run the client on the other node
taskset -c 0-31 ./ib_write_bw -d rocep28s0 -F -a --report_gbits -q $SERVER_IP_ADDRESS
Containers¶
For the container experiments we used a dstack’s distributed task.
RCCL tests
- Define a task configuration
type: task
name: rccl-tests
nodes: 2
startup_order: workers-first
stop_criteria: master-done
# Mount the system libraries folder from the host
volumes:
- /usr/local/lib:/mnt/lib
image: rocm/dev-ubuntu-22.04:6.4-complete
env:
# - NCCL_DEBUG=INFO
- OPEN_MPI_HOME=/usr/lib/x86_64-linux-gnu/openmpi
commands:
# Setup MPI and build RCCL tests
- apt-get install -y git libopenmpi-dev openmpi-bin
- git clone https://github.com/ROCm/rccl-tests.git
- cd rccl-tests
- make MPI=1 MPI_HOME=$OPEN_MPI_HOME
# Preload the RoCE driver library from the host (for Broadcom driver compatibility)
- export LD_PRELOAD=/mnt/lib/libbnxt_re-rdmav34.so
# Run RCCL tests via MPI
- |
if [ $DSTACK_NODE_RANK -eq 0 ]; then
mpirun --allow-run-as-root \
--hostfile $DSTACK_MPI_HOSTFILE \
-n $DSTACK_GPUS_NUM \
-N $DSTACK_GPUS_PER_NODE \
--mca btl_tcp_if_include bond0 \
-x LD_PRELOAD \
-x NCCL_IB_GID_INDEX=3 \
-x NCCL_IB_DISABLE=0 \
./build/all_reduce_perf -b 4 -e 16G -f 2 -g 1 -w 5 --iters 100 -c 0;
else
sleep infinity
fi
resources:
gpu: MI300X:8
Performance tests
- Define a task configuration
type: task
name: perf-tests
nodes: 2
startup_order: master-first
stop_criteria: all-done
# Mount the system libraries folder from the host
volumes:
- /usr/local/lib:/mnt/lib
image: rocm/dev-ubuntu-22.04:6.4-complete
commands:
# Build perf tests
- git clone https://github.com/linux-rdma/perftest
- cd perftest
- ./autogen.sh
- ./configure
- make & make install
# Preload the RoCE driver library from the host (for Broadcom driver compatibility)
- export LD_PRELOAD=/mnt/lib/libbnxt_re-rdmav34.so
- |
# Run server in master node
if [ $DSTACK_NODE_RANK -eq 0 ]; then
taskset -c 0-31 ./ib_write_bw -d rocep28s0 -F -a --report_gbits -q 2
else
# Run client in worker node
taskset -c 0-31 ./ib_write_bw -d rocep28s0 -F -a --report_gbits -q 2 $DSTACK_MASTER_NODE_IP
fi
resources:
gpu: MI300X:8
- Run the task
dstack apply -f perf.dstack.yml
To enable the bidirectional mode, add the -b flag to both the server and client commands.
To enable device-to-device mode, add the --use_rocm=0 flag to both the server and client commands.
- Run the task
dstack apply -f rccl.dstack.yml
For all_reduce, replace all_gather_perf with all_reduce_perf. all_gather and all_reduce tests are run 10 times to obtain bandwidth data for deviation calculation.
Partitions¶
To test partitioning, we first set the GPU to NPS4 mode on bare-metal using amd-smi.
sudo amd-smi set --memory-partition NPS4
Stream benchmark
- Clone the benchmark repo
git clone https://github.com/dstackai/benchmarks.git
- Run the benchmarks
cd benchmarks
git checkout amd_partitions_benchmark
python3 amd/partitions/benchmark_stream.py --size $SIZE
The SIZE value is 1M, 2M, .., 8G.
vLLM data parallel
-
Build nginx container (see vLLM-nginx).
-
Create
nginx.conf
worker_processes 1;
events {
worker_connections 1024;
}
http {
upstream backend {
least_conn;
server vllm0:8000 max_fails=3 fail_timeout=10000s;
server vllm1:8000 max_fails=3 fail_timeout=10000s;
server vllm2:8000 max_fails=3 fail_timeout=10000s;
server vllm3:8000 max_fails=3 fail_timeout=10000s;
server vllm4:8000 max_fails=3 fail_timeout=10000s;
server vllm5:8000 max_fails=3 fail_timeout=10000s;
server vllm6:8000 max_fails=3 fail_timeout=10000s;
server vllm7:8000 max_fails=3 fail_timeout=10000s;
}
server {
listen 80;
location / {
proxy_pass http://backend;
proxy_set_header Host $host;
proxy_set_header X-Real-IP $remote_addr;
proxy_set_header X-Forwarded-For $proxy_add_x_forwarded_for;
proxy_set_header X-Forwarded-Proto $scheme;
}
}
}
- Create the Docker network
docker network create vllm_nginx
- Launch 8 vLLM server instances
docker run -itd \
--ipc host \
--network vllm_nginx \
--device=/dev/kfd \
--device=/dev/dri/renderD128 \
--group-add video \
-v $hf_cache_dir:/root/.cache/huggingface/ \
-e HUGGING_FACE_HUB_TOKEN=$HF_TOKEN \
-p 8081:8000 \
--name vllm0 \
rocm/vllm:latest \
vllm serve meta-llama/Llama-3.1-8B-Instruct \
--trust-remote-code \
--max-model-len 4096
Above command shows for partition-0, which is device /dev/dri/renderD128. For other partitions use renderD129 to renderD135 and –name vllm1 to vllm7.
- Launch Nginx
- From the host machine download sharegpt dataset and run vLLM benchmarks
wget \
"https://huggingface.co/datasets/anon8231489123/ShareGPT_Vicuna_unfiltered/resolve/main/ShareGPT_V3_unfiltered_cleaned_split.json"
python3 benchmark_serving.py \
--backend vllm \
--model meta-llama/Llama-3.1-8B-Instruct \
--dataset-name sharegpt --dataset-path="ShareGPT_V3_unfiltered_cleaned_split.json" \
--request-rate=$QPS
The QPS values are 2, 4, .., 32.
To run the vLLM benchmark on default mode we used a single GPU with below vLLM launch command on baremetal.
vllm serve meta-llama/Llama-3.1-8B-Instruct --max-model-len 4096
Pytorch tensor parallel
For partitioned mode we used the following steps:
- Clone the benchmark repo
git clone https://github.com/dstackai/benchmarks.git
- Run the inference benchmark
cd benchmarks
git checkout amd_partitions_benchmark
HIP_VISIBLE_DEVICES=0,1,2,3,4,5,6,7 python3 toy_inference_benchmark.py \
--batch-size $BATCH_SIZE
The BATCH_SIZE values are 128, 256, .., 32768.
For default mode we used single MI300X with below command:
HIP_VISIBLE_DEVICES=0 python3 toy_inference_benchmark.py \
--batch-size $BATCH_SIZE
Source code¶
All source code and findings are available in our GitHub repo.
References¶
- AMD Instinct MI300X GPU partitioning overview
- Deep dive into partition modes by AMD.
- RCCL and PerfTest for cluster validation by Dell.
What's next?¶
Benchmark the performance impact of VMs vs bare-metal for inference and training, to quantify virtualization overhead.
Acknowledgments¶
Hot Aisle¶
Big thanks to Hot Aisle for providing the compute power behind these benchmarks. If you’re looking for fast AMD GPU bare-metal or VM instances, they’re definitely worth checking out.